卷积神经网络¶
1. 多层感知机的限制¶
- 输入是一维向量 \(x \in \mathbb{R}^{1*d}\)的情况下,权重 \(W\in \mathbb{R}^{h*d}\) (h为向量 \(h\) 的大小)只需要为二维张量:

\(h_j = \sum_{j}{W_{i,j}{x_j}} + b_j\)
- 在输入是二维图像 \(X\) 的情况下,隐藏层表示 \(H\) 在数学上是一个矩阵,在代码中表示为二维张量。使用 \([X]_{i,j}\) 和 \([H]_{i,j}\) 分别表示输入图像和隐藏表示中位置 \((i,j)\) 处的像素。此时要求权重 \(W\) 为一个四维张量:

为了节省参数(避免参数随着输入变大而变得无限多),我们假设有一个”检测器“扫描图像,将图像分割成多个区域(blocks),并为每个区域包含目标的可能性打分。而索引a和b通过在正偏移和负偏移之间移动覆盖了整个图像,对于隐藏表示中任意给定位置 \(( i , j )\) 处的像素值 \([H]_{i,j}\) , 通过对 \(X\) 中以 \((i,j)\) 为中心的像素进行加权求和得到,权重为 \(v_{i,j,a,b}\) , 实现了 ”检测器“ 功能。
其中,从 \(W\) 到 \(V\) 的转化至少形式上的转化,这两个四阶张量的元素之间存在一一对应的关系:
$$ [V]{i,j,a,b} = [W] $$
1.1 平移不变性 Translation Invariance¶
检测对象在输入 \(X\) 中的平移,应该仅导致隐藏表示 \(H\) 中的平移。也就是说不管出现在图像中的哪个位置,神经网络的底层应该对相同的图像区域做出类似的响应。
但如公式 \(h_{i,j} = \sum_{a,b}{v_{i,j,a,b}{x_{i+a,j+b}}}\) 所示,\(i,j\)的变化会导致 权重 \(v\) 发生变化,使得到的 \(h\) 也发生变化,违反了平移不变性。
所以,\(v\) 不应该依赖于 \((i,j)\),定义:\(v_{i,j,a,b} = v_{a,b}\),得到:
$$ h_{i,j} = \sum_{a,b}{v_{a,b}}{x_{i+a,j+b}} $$
这就是2维交叉相关,增加了重复性,减少参数数量,降低了模型复杂度
1.2 局部性¶
神经网络的底层应该只探索输入图像中的局部区域,而不考虑图像远处区域的内容。为了收集用来训练参数 \([H]_{i,j}\) 的相关信息,
在 \(|a|> \Delta\) 和 \(|b| > \Delta\) 的范围之外,我们可以设置 \([V]_{a,b} = 0\),故将公式重写为:
$$ [H]{a,j} = u + \sum[V]}^{\Delta}\sum_{b = -\Delta}^{\Delta{a,b}[X] $$
\(V\) 被称为卷积核(convolution kernel)或者滤波器(filter),亦或简单地称之为该卷积层的权重.
2 卷积层¶
核矩阵和偏移是可学习的参数,核矩阵的大小是超参数
2.1 二维交叉相关¶

2.2 一维和三维交叉相关¶

- 一维可以做文本、语言和时序序列
- 三维可以做视频、医学图像和气象地图
2.3 代码实现¶
3. 填充(Padding)与步幅(Stride)¶
3.1 Padding¶
在应用多层卷积时,我们常常丢失边缘像素。 由于我们通常使用小卷积核,因此对于任何单个卷积,我们可能只会丢失几个像素。 但随着我们应用许多连续卷积层,累积丢失的像素数就多了。 解决这个问题的简单方法即为填充(padding):在输入图像的边界填充元素(通常填充元素是0)。

如果添加 \(P_h\) 行填充(一半顶部一半底部),\(P_w\)列填充(一半左侧一半右侧),那么输出大小为:
所以,为了使得输出不丢失边缘像素,我们设置 \(p_h = k_h-1\) 和 \(p_w = k_w-1\),使输入和输出具有相同的高度和宽度。
- 假设 \(k_h\)是奇数,我们将在高度的两侧填充 \(p_h/2\) 行
- 如果 \(k_h\) 是偶数,则一种可能性是在输入顶部填充 \(⌈p_h/2⌉\) 行,在底部填充 \(⌊p_h/2⌋\) 行。同理,我们填充宽度的两侧。
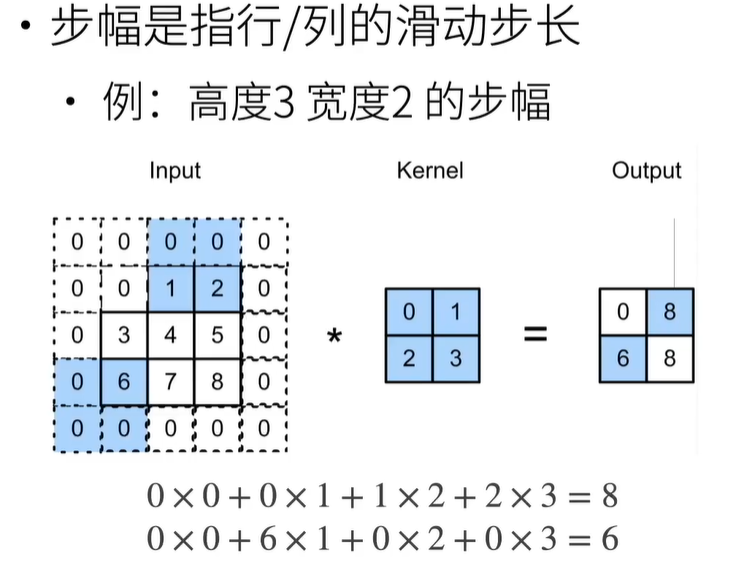
3.2 Stride¶
步幅用于减少输出大小。
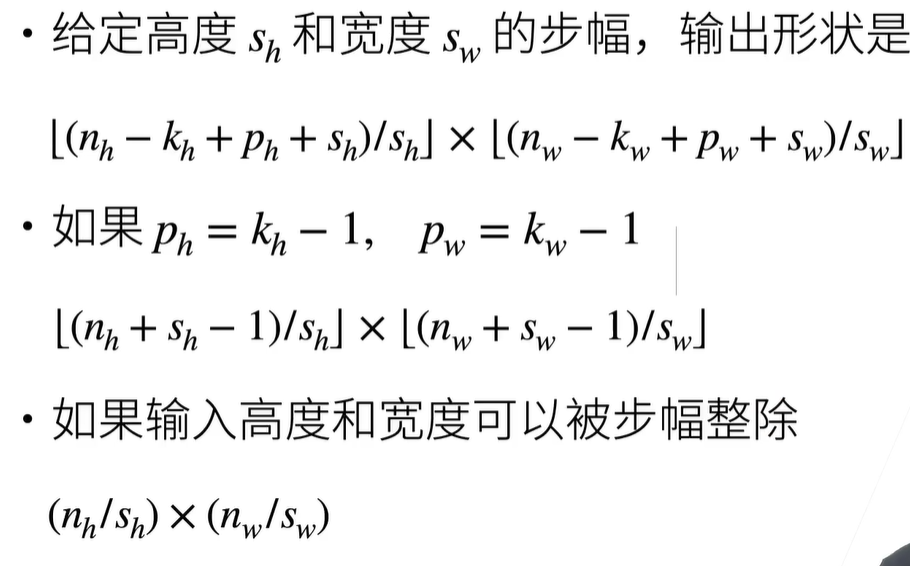
上面两种情况是为了向上取整。
3.3 代码实现¶
import torch
from torch import nn
# 为了方便起见,我们定义了一个计算卷积层的函数。
# 此函数初始化卷积层权重,并对输入和输出提高和缩减相应的维数
def comp_conv2d(conv2d, X):
# 这里的(1,1)表示批量大小和通道数都是1
X = X.reshape((1, 1) + X.shape)
Y = conv2d(X)
# 省略前两个维度:批量大小和通道
return Y.reshape(Y.shape[2:])
# 请注意,这里每边都填充了1行或1列,因此总共添加了2行或2列
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1)
X = torch.rand(size=(8, 8))
comp_conv2d(conv2d, X).shape
结果为:torch.Size([8, 8]),因为8-3+1+2 = 8
当卷积核的高度和宽度不同时,我们可以填充不同的高度和宽度,使输出和输入具有相同的高度和宽度:
结果同上,因为8-5+1+2x2 = 8,8-3+1+1x2 = 8.
我们将高度和宽度的步幅设置为2,从而将输入的高度和宽度减半:
结果为 torch.Size([4, 4]),(8-3+1+1*2)/2 = 4.
接下来是一个稍微复杂的例子:
conv2d = nn.Conv2d(1, 1, kernel_size=(3, 5), padding=(0, 1), stride=(3, 4))
comp_conv2d(conv2d, X).shape
答案为 torch.Size([2, 2]),(8-3+1+0*2)/3 = 2, (8-5+1+1x2)/4 = 2(向上取整)
4. 多输入多输出通道¶
4.1 多输入通道¶
当输入包含多个通道时,需要构造一个与输入数据具有相同输入通道数的卷积核,以便与输入数据进行互相关运算。
假设通道数为 \(c_i\),那么卷积核的大小为 \(c_i \times k_h\times k_w\)

4.2 多输出通道¶
到目前为止,不论有多少输入通道,我们还只有一个输出通道。在最流行的神经网络架构中,随着神经网络层数的加深,我们常会增加输出通道的维数,通过减少空间分辨率以获得更大的通道深度。直观地说,我们可以将每个通道看作对不同特征的响应。
用 \(c_i\) 和 \(c_o\) 分别表示输入和输出通道的数目,为了获得多个通道的输出,我们可以为每个输出通道创建一个形状为 \(c_i \times k_h\times k_w\) 的卷积核张量,最终:

4.3 1 \(\times\) 1卷积层¶
不识别空间模式,只是融合通道:

4.4 代码实现¶
实现多输入通道互相关运算,即对每个通道执行互相关操作,然后将结果相加。
import torch
from d2l import torch as d2l
def corr2d_multi_in(X, K):
# 先遍历“X”和“K”的第0个维度(通道维度),再把它们加在一起
return sum(d2l.corr2d(x, k) for x, k in zip(X, K))
X = torch.tensor([[[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]],
[[1.0, 2.0, 3.0], [4.0, 5.0, 6.0], [7.0, 8.0, 9.0]]])
K = torch.tensor([[[0.0, 1.0], [2.0, 3.0]], [[1.0, 2.0], [3.0, 4.0]]])
corr2d_multi_in(X, K)
#output:
#tensor([[ 56., 72.],
# [104., 120.]])
实现计算多个通道的输出的互相关函数:
def corr2d_multi_in_out(X, K):
# 迭代“K”的第0个维度,每次都对输入“X”执行互相关运算。
# 最后将所有结果都叠加在一起
return torch.stack([corr2d_multi_in(X, k) for k in K], 0)
K = torch.stack((K, K + 1, K + 2), 0)
K.shape
#K从3个维度变成4个维度:输出是3,输入是2,宽高为2*2
#torch.Size([3, 2, 2, 2])
corr2d_multi_in_out(X, K)
#tensor([[[ 56., 72.],
# [104., 120.]],
# [[ 76., 100.],
# [148., 172.]],
# [[ 96., 128.],
# [192., 224.]]])
使用全连接层实现\(1\times1\)卷积:
def corr2d_multi_in_out_1x1(X, K):
c_i, h, w = X.shape
c_o = K.shape[0]
#变成c_i个大小为h*w的向量
X = X.reshape((c_i, h * w))
K = K.reshape((c_o, c_i))
# 全连接层中的矩阵乘法
Y = torch.matmul(K, X)
return Y.reshape((c_o, h, w))
#验证
X = torch.normal(0, 1, (3, 3, 3))
K = torch.normal(0, 1, (2, 3, 1, 1))
Y1 = corr2d_multi_in_out_1x1(X, K)
Y2 = corr2d_multi_in_out(X, K)
assert float(torch.abs(Y1 - Y2).sum()) < 1e-6
5. 池化层¶
pooling具有双重目的:降低卷积层对位置的敏感性,同时降低对空间降采样表示的敏感性
5.1 最大汇聚层和平均汇聚层¶
池运算是确定性的,我们通常计算汇聚窗口中所有元素的最大值或平均值.
- maximum pooling:获取每个窗口中最强模式信号

- average pooling:获取每个窗口中平均模式信号
5.2 填充与步幅¶
与卷积层一样,汇聚层也可以改变输出形状。和以前一样,我们可以通过填充和步幅以获得所需的输出形状。
但是池化层没有可学习的参数,kernel是固定的;且不可融合通道,输入通道数 = 输出通道数
5.3 代码实现¶
略
6. LeNet¶
6.1 介绍¶
总体由两个部分组成:
- 卷积编码器:由两个卷积层组成,学习图片空间信息
- 全连接层密集块:由三个全连接层组成,转化到类别空间

-
第一个卷积层 5*5,输出通道为6(矩阵大小不变);
-
接着第一个池化层2*2,输出通道为6
-
第二个卷积层5*5,输出通道16(矩阵大小变化)
-
第二个池化层2*2,输出通道16
-
接着接两个全连接层
- 最后输出层(也可视作全连接层)

6.2 代码实现¶
只需要实例化一个Sequential块并将需要的层连接在一起:
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
#设置padding使得输入输出矩阵大小一致
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))
模型训练,修改代码,使其能在GPU上计算:
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
"""使用GPU计算模型在数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() # 设置为评估模式
if not device:
device = next(iter(net.parameters())).device
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
#@save
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型(在第六章定义)"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
#用xavier初始化权重
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
#设置动画效果(打印信息)
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,样本数
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
#打印信息
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')